Body
介绍
Body类专门用于雕刻建模,它可以生成复杂形体的网格,虽然无法得到准确的模型细节,但可以再设计初期得到相对准确的刚度和质量信息,以便进行系统级的模型动力学分析。
类结构
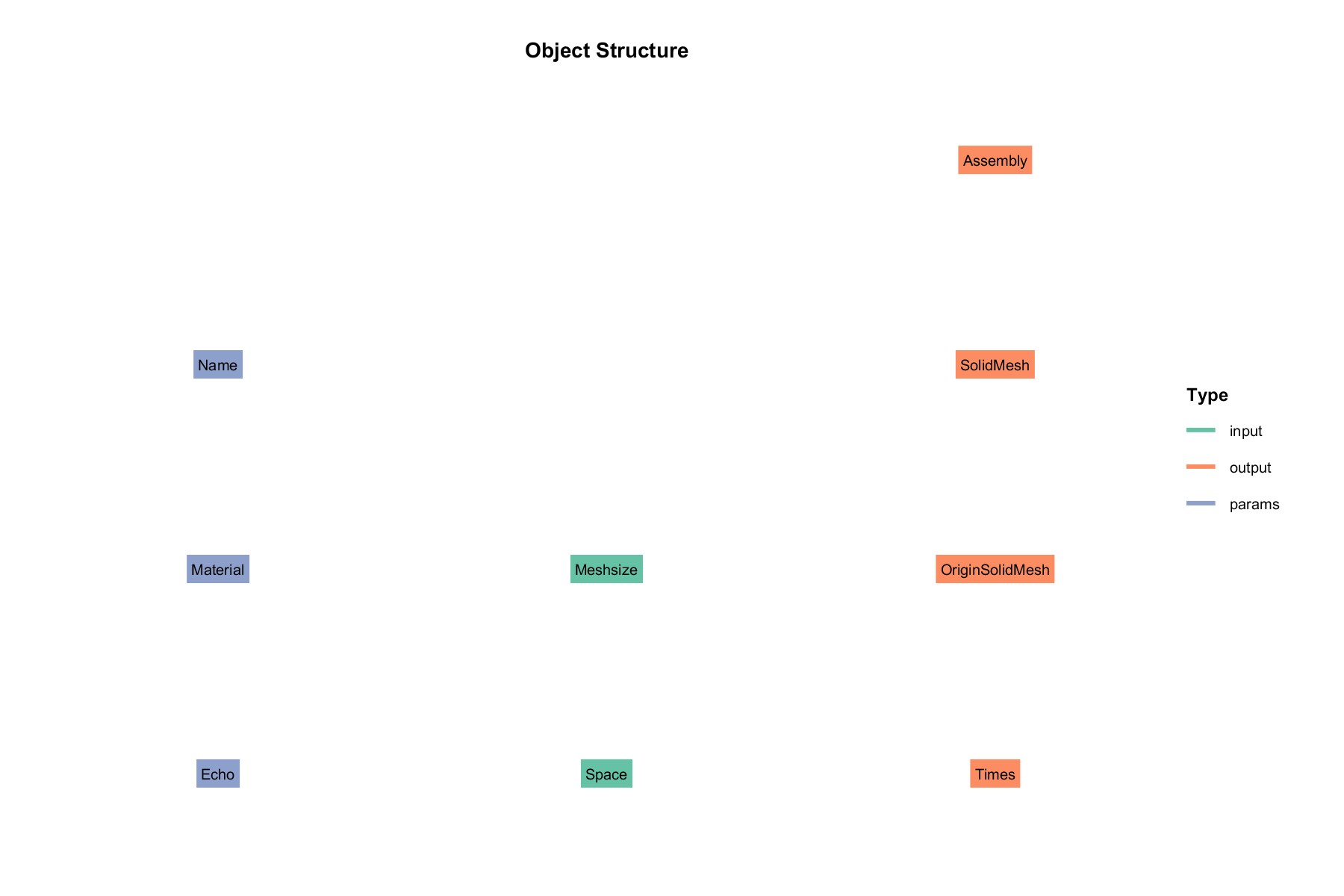
输入 input:
- Meshsize : 网格大小
- Space : 空间尺寸
参数 params:
- Name : 名称
- Material : 材料
输出 output :
- Assembly : 装配体
- SolidMesh : 实体网格
- OriginSolidMesh :平滑前实体网格
- Times : 雕刻次数
案例
Create Body (Flag=1)
以一个风电扭力臂为例,图片来自于德利佳官网3~3.6MW平台 http://www.dljtransmission.com/ctt/1/89.htm ,风电扭力臂用来传递扭矩,观察图片,两端支座用以连接支撑,中间连接轴承,上端增加两吊耳用以吊装,同时增加加强筋增大局部刚度。

%% WindTurbine Gearbox Torquearm
lx=400;
ly=3200;
lz=2100;
inputStruct.Space=[lx,ly,lz];% 设计空间长、宽、高
inputStruct.Meshsize=15; %网格大小 [mm];
paramsStruct.Name='Torque_arm_build';
TorqueArm= body.Body(paramsStruct, inputStruct);
TorqueArm = TorqueArm.solve();
Plot3D(TorqueArm)
%% Basic Circle
a=Point2D('Point Ass1');
a=AddPoint(a,[0;0;185;185;210;210;270;160;160;0],...
[1750/2;1890/2;1890/2;1750/2;1500/2;1200/2;1000/2;1000/2;1500/2;1750/2]);
b=Line2D('Line Ass1');
b=AddCurve(b,a,1);
inputHousing.Outline= b;
paramsHousing.Degree = 360;
obj1=housing.Housing(paramsHousing, inputHousing);
obj1=obj1.solve();
obj1=OutputSolidModel(obj1);
Plot3D(obj1);
%% Support
a=Point2D('Point Ass1');
a=AddPoint(a,0,0);
b=Line2D('Line Ass1');
b=AddCircle(b,450/2,a,1);
inputplate1.Outline= b;
inputplate1.Thickness = 280;
paramsplate1 = struct();
obj2=plate.Commonplate(paramsplate1, inputplate1);
obj2 = obj2.solve();
obj2=OutputSolidModel(obj2);
Plot3D(obj2);
%% Connection
a=Point2D('Point Ass1');
a=AddPoint(a,[-145;145;330;330;145;-145;-145],...
[300;300;380;-380;-300;-300;300]);
b=Line2D('Line Ass1');
b=AddCurve(b,a,1);
inputplate1.Outline= b;
inputplate1.Thickness = 185;
paramsplate1 = struct();
obj3=plate.Commonplate(paramsplate1, inputplate1);
obj3 = obj3.solve();
obj3=OutputSolidModel(obj3);
Plot3D(obj3);
%% Shaft
a=Point2D('Point Ass1');
a=AddPoint(a,0,0);
b=Line2D('Line Ass1');
b=AddCircle(b,330/2,a,1);
inputplate1.Outline= b;
inputplate1.Thickness = 280;
paramsplate1 = struct();
obj4=plate.Commonplate(paramsplate1, inputplate1);
obj4 = obj4.solve();
obj4=OutputSolidModel(obj4);
Plot3D(obj4);
%% Stiffness
Stiffness_Num=16;
a=Point2D('Point Ass1');
a=AddPoint(a,[185;273;273;210;210;185;185],...
[1890/2;1750/2;1000/2;1000/2;1200/2;1750/2;1890/2]);
b=Line2D('Line Ass1');
b=AddCurve(b,a,1);
inputplate1.Outline= b;
inputplate1.Thickness = 80;
paramsplate1 = struct();
obj5=plate.Commonplate(paramsplate1, inputplate1);
obj5 = obj5.solve();
obj5=OutputSolidModel(obj5);
Plot3D(obj5);
%% Lifting hole
a=Point2D('Point Ass1');
a=AddPoint(a,[-80;200;200;80;-80;-80],...
[80;80;-100;-100;-250;80]);
a=AddPoint(a,0,0);
b=Line2D('Line Ass1');
b=AddCurve(b,a,1);
h=Line2D('hole Ass1');
h=AddCircle(h,40,a,2);
inputplate1.Outline= b;
inputplate1.Hole= h;
inputplate1.Thickness = 80;
paramsplate1 = struct();
obj6=plate.Commonplate(paramsplate1, inputplate1);
obj6 = obj6.solve();
obj6=OutputSolidModel(obj6);
Plot3D(obj6);
%% Sculpture model
pos1=[-185/2,0,0,0,0,0];
TorqueArm=BodyAdd(TorqueArm,obj1.output.SolidMesh,'position',pos1);
Plot3D(TorqueArm);
mm1 = obj2.output.SolidMesh;
pos2=[-280/2,2390/2,0,0,-90,0];
TorqueArm=BodyAdd(TorqueArm,mm1,'position',pos2);
Plot3D(TorqueArm);
pos3=[-281/2,-2390/2,0,0,-90,0];
TorqueArm=BodyAdd(TorqueArm,mm1,'position',pos3);
Plot3D(TorqueArm);
mm2 = obj3.output.SolidMesh;
pos4=[-185/2,2390/2,0,90,0,90];
TorqueArm=BodyAdd(TorqueArm,mm2,'position',pos4);
Plot3D(TorqueArm);
pos5=[185/2,-2390/2,0,90,0,-90];
TorqueArm=BodyAdd(TorqueArm,mm2,'position',pos5);
Plot3D(TorqueArm);
mm3 = obj4.output.SolidMesh;
pos6=[-280/2,2390/2,0,0,-90,0];
TorqueArm=BodyRemove(TorqueArm,mm3,'position',pos6);
Plot3D(TorqueArm);
pos7=[-280/2,-2390/2,0,0,-90,0];
TorqueArm=BodyRemove(TorqueArm,mm3,'position',pos7);
Plot3D(TorqueArm);
mm4 = obj5.output.SolidMesh;
for i=1:Stiffness_Num
pos8=[-185/2,0,0,360/Stiffness_Num*(i-1),0,0];
TorqueArm=BodyAdd(TorqueArm,mm4,'position',pos8);
end
Plot3D(TorqueArm);
mm5 = obj6.output.SolidMesh;
pos9=[80/2,1580/2,660,-90,0,90];
TorqueArm=BodyAdd(TorqueArm,mm5,'position',pos9);
Plot3D(TorqueArm);
pos10=[-80/2,-1580/2,660,-90,0,-90];
TorqueArm=BodyAdd(TorqueArm,mm5,'position',pos10);
Plot3D(TorqueArm);
TorqueArm=SmoothFace(TorqueArm);
Plot3D(TorqueArm);
TorqueArm=SmoothFace(TorqueArm,20);
Plot3D(TorqueArm);
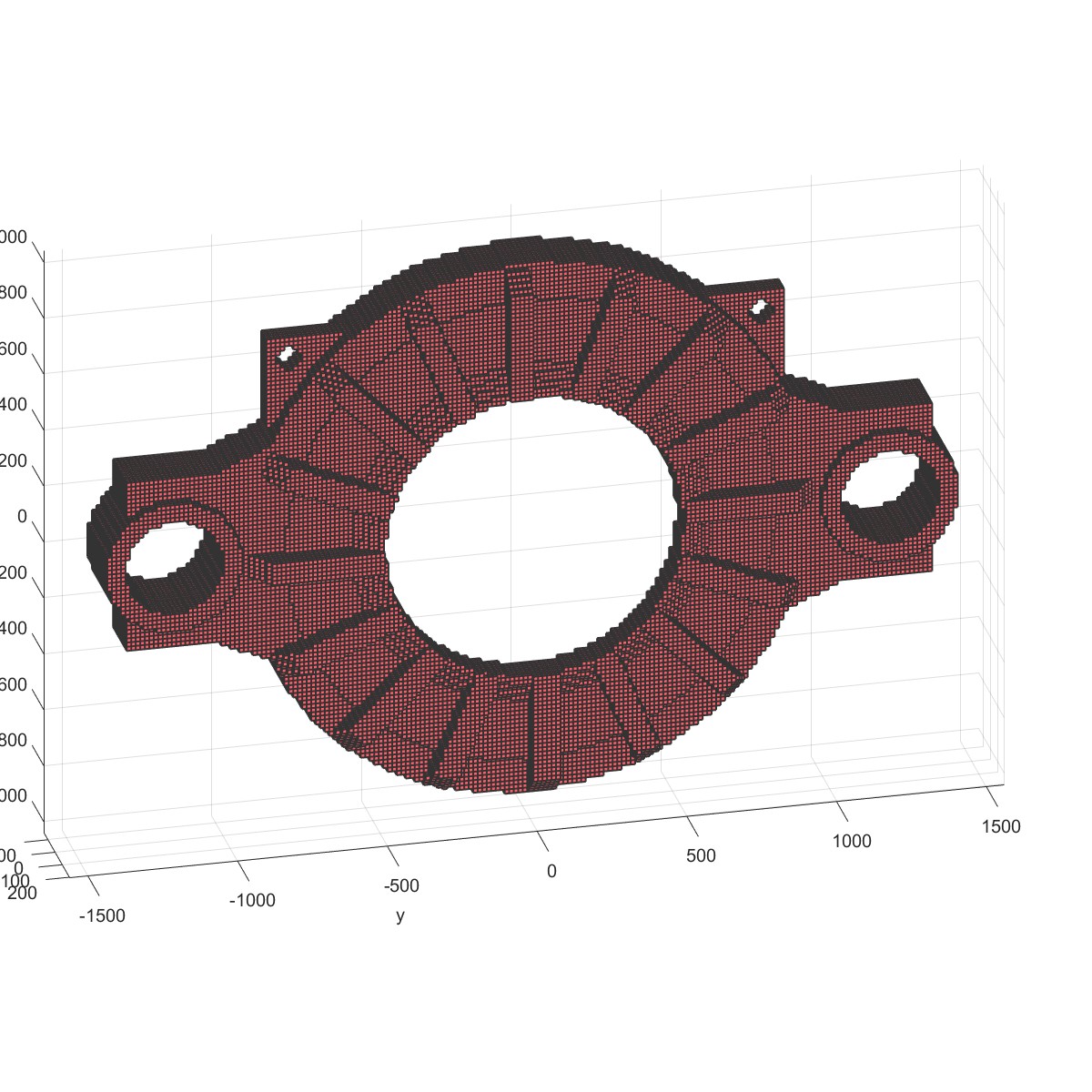
首先生成一块原料,在通过BodyAdd和BodyRemove增删网格,简要思路如下图所示:
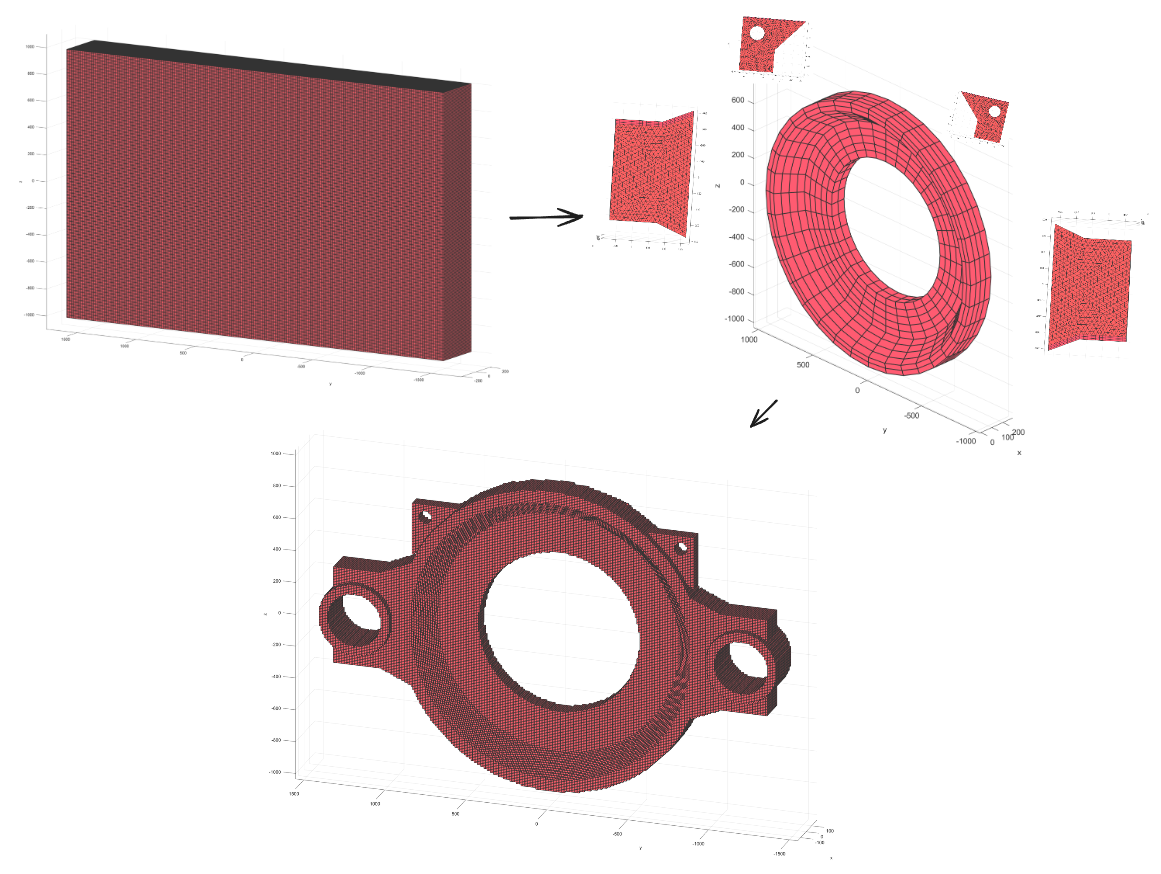
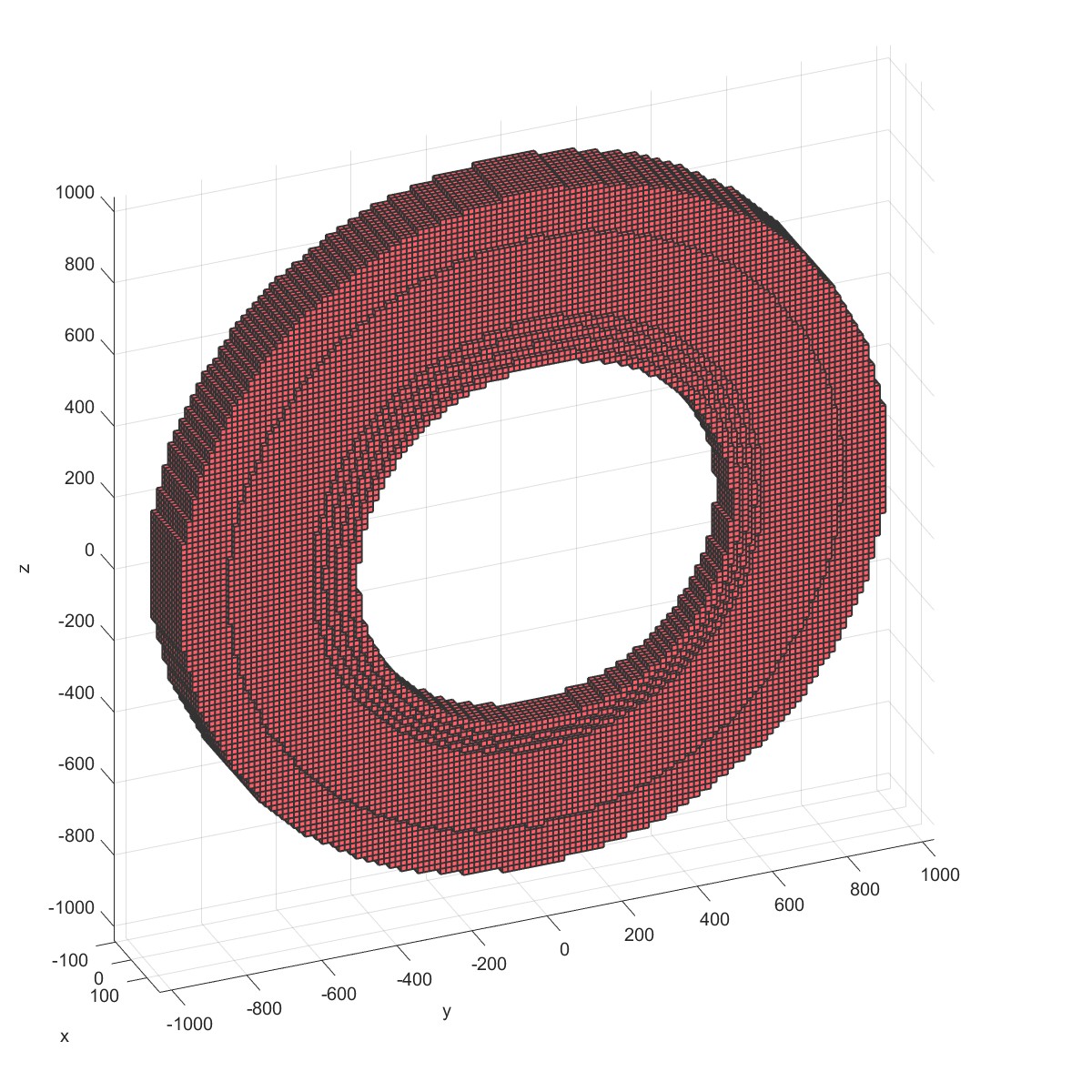
生成中心轴承座主体部分
生成两端支撑轴的支座:

生成支座外壳和主体连接:
增加一些加强筋:
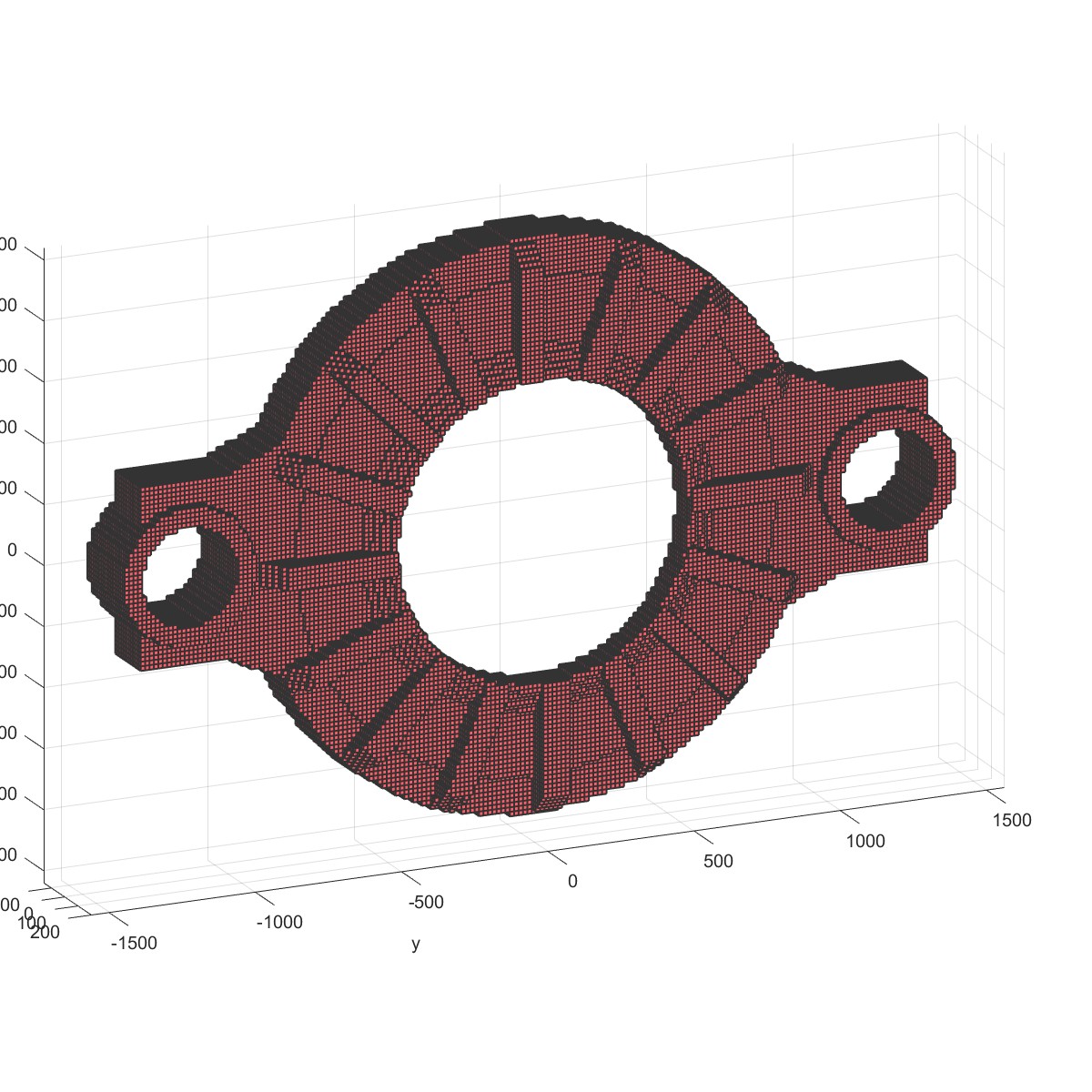
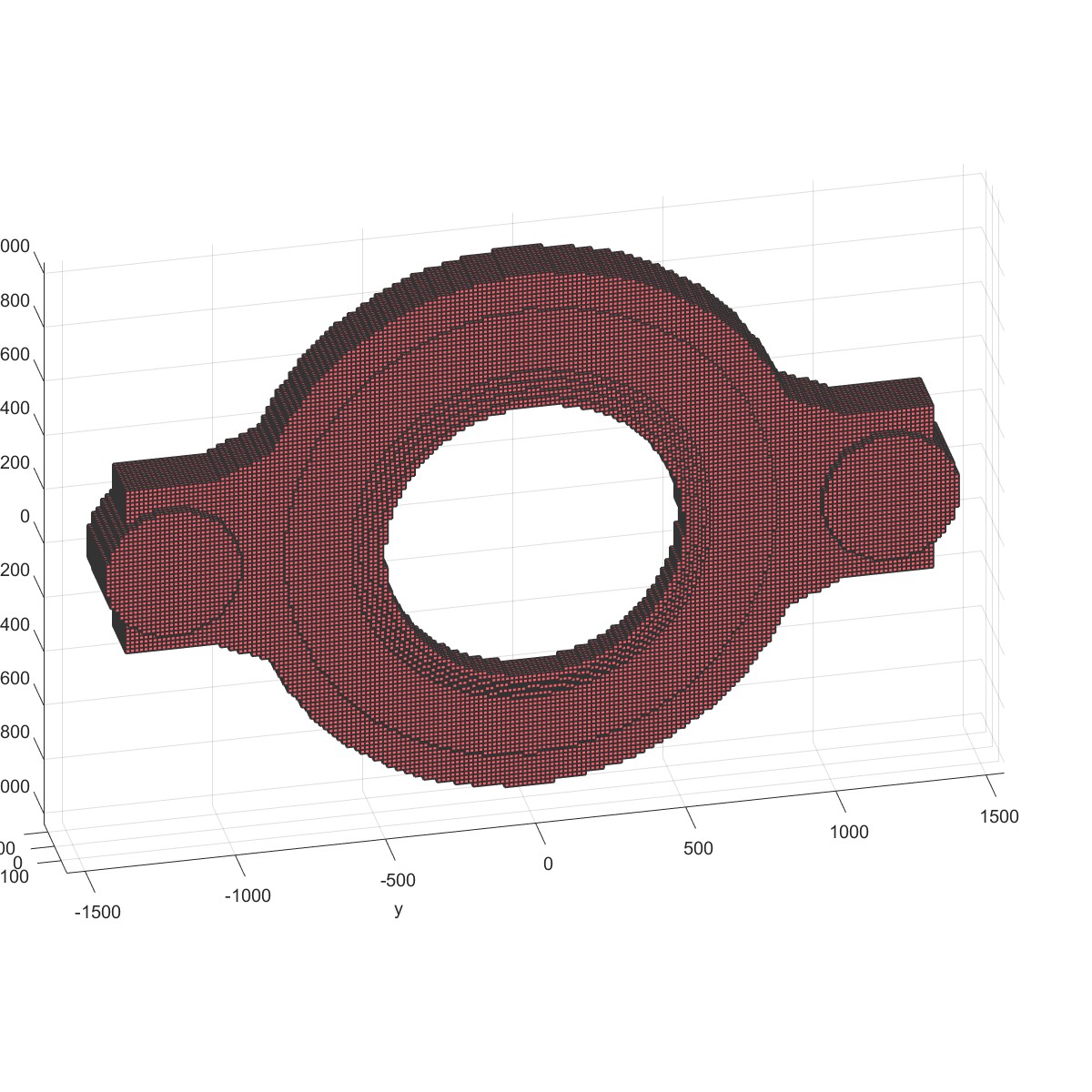
增加吊耳,可以看到此时的网格已经和图片非常相似了。
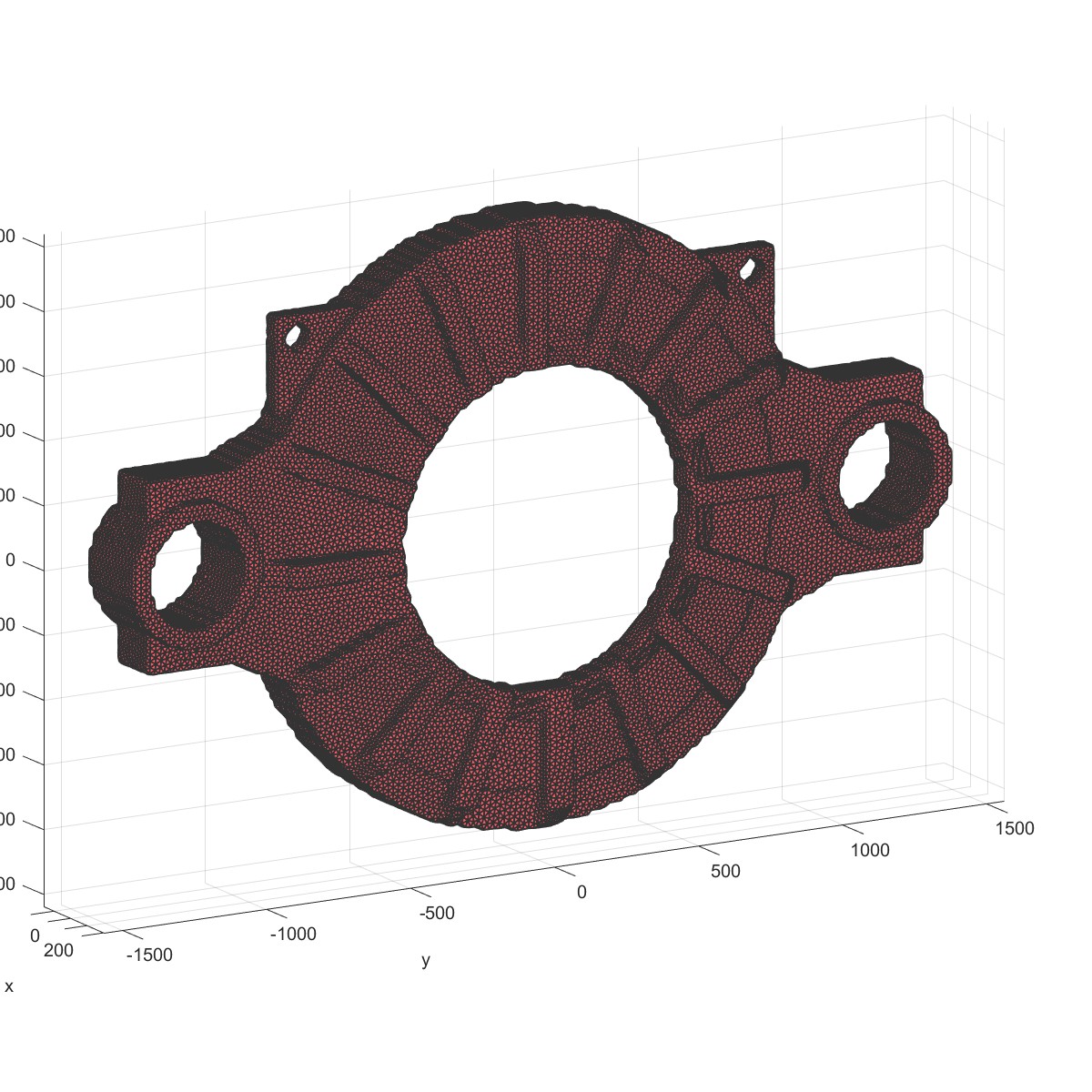
以此模型为基础平滑网格,并生成四面体网格,这时的网格已经可以导出进行分析。
参考文献
本网站基于Hexo 3-Hexz主题生成。如需转载请标注来源,如有错误请批评指正,欢迎邮件至 392176462@qq.com